
makex机器人程序_MakeX干货 | 如何使用视觉模块?
视觉是感知世界最敏感的
一个优秀的机器人怎么能没有“眼睛”呢
今天我们就来给大家科普一下
2020年新增的器材
视觉模块
一、什么是视觉模块?
基于Pixy2开发,支持Scratch图形化编程,轻松拖拽积木块即可实现编程创作,极大降低了编程使用门槛;同时支持Python、Arduino C编程代码控制(搭配不同的主控板即可实现),可以满足不同教学场景使用。除此之外,它还支持10s高速学习,只需轻松按下板载按钮,最快10S即可完成学习,同时还能确保识别的准确性,是一款非常适合人工智能教学使用的视觉模块。
特点:简单易上手、10s高速学习、低门槛的人工智能视觉传感器;
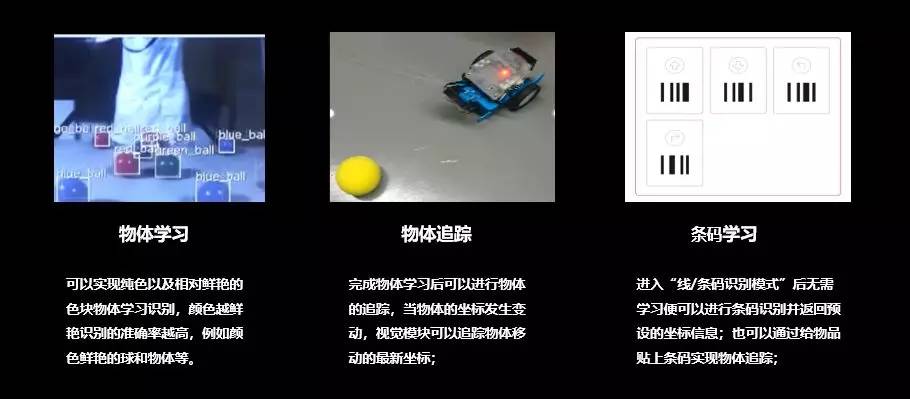
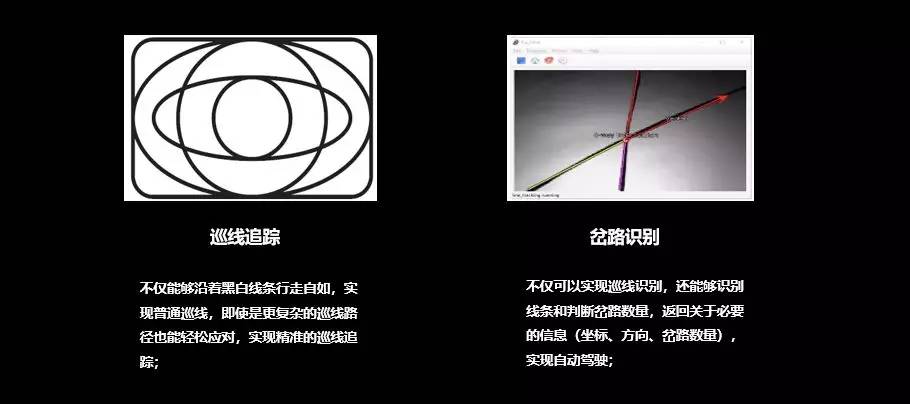
五大功能:物体学习、物体追踪、条码识别、巡线追踪、岔路检测。
▲ 参考Pixy2功能介绍视频
二、如何使用视觉模块?
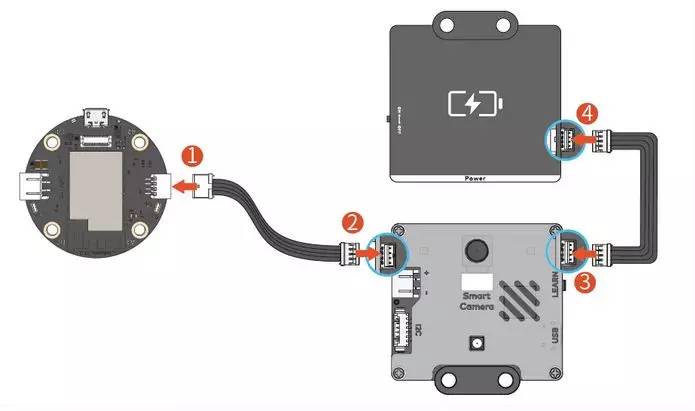
连接方法:
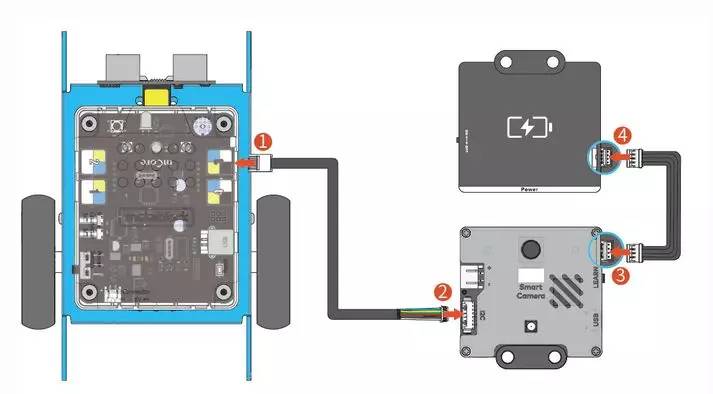
1.连接主控板
通过不同的连线方式,可以将视觉模块作为一个 RJ25 电子模块或 mBuild 电子模块,连接到 mBot 或光环板,然后使用 mBot 或光环板控制视觉模块。
方式一 使用 mBuild 电源模块供电(推荐)
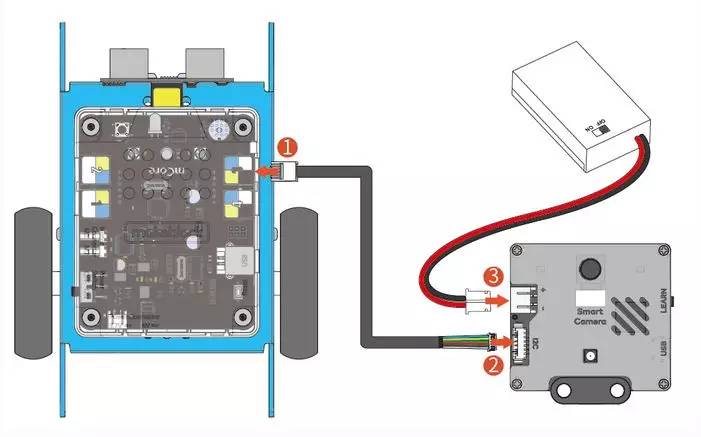
方式二 使用 3.7V 锂电池供电
2.连接到光环板
注意:仅通过 USB 供电可能会影响模块的正常使用,建议使用 mBuild 电源模块供电。
学习识别物体方法:
1.【离线模式】:通过板载按钮直接学习
A.长按按钮;
B.出现红灯时放手;
C.将要学习的色块放到摄像头正前方;
D.观察视觉模块正面或背面的彩色指示灯,指示灯的颜色与画面中心的颜色一致;
E.当画面中心颜色与要学习色块十分接近时,再次按下按钮;
F.学习成功,此时摄像头识别到色块时,指示灯会显示色块的颜色;
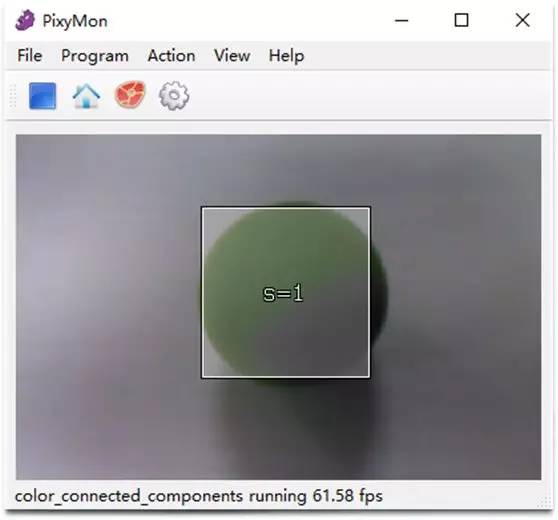
2.【在线模式】:通过安装PixyMon2-视觉模块配套软件
A.安装PixyMon2软件后打开运行;
B.使用MicroUSB连接电脑和视觉模块;
C.将需要学习的色块放到摄像头正前方,当显示画面的时候,点击action-setsignature,用鼠标选中需要学习的范围,目前最多支持学习并记录7种色块(橙、黄、绿、青、蓝、紫灯亦可,不同颜色代表学习不同物体);
D.学习成功,此时摄像头识别到色块时,指示灯会显示色块的颜色;

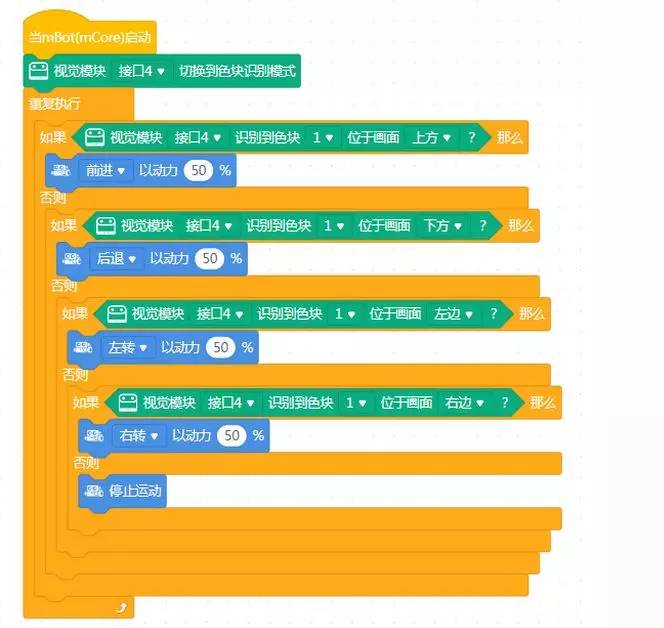
三、在慧编程软件中如何操作?
色块学习完成后,可以使用如下 慧编程示例代码完成简单的色块(色块1)追踪功能。
四、MakeX Premier-雷霆营救 视觉方案
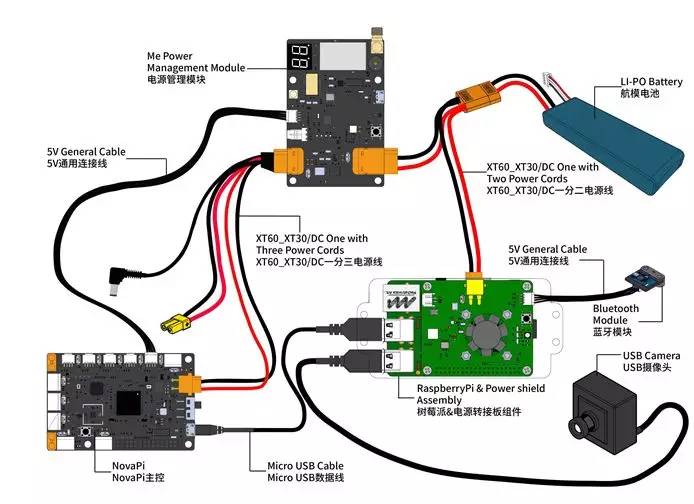
以上是 MakeX Starter-智慧交通 和 MakeX Challenge – 智造大师 的视觉模块,那么接下来我们来看看适用于 MakeX Premier-雷霆营救的树莓派视觉方案。树莓派视觉采用树莓派加摄像头实现图像采集、处理和识别,可以识别出字母图案的几何信息(如位置、尺寸以及距离等)。结合NovaPi,还可以搭建出具有自动识别能力的机器人。
搭配RaspberryPi 3 Model B+主控使用
最高有效像素:640(H)X 480(V)
输出图像格式:MJPEG/YUV2(YUYV)
工作电压:5V
镜头:6mm
可调节参数:亮度、对比度、色饱和度、色调、清晰度伽玛、白平衡、逆光对比、不光度、画面反转
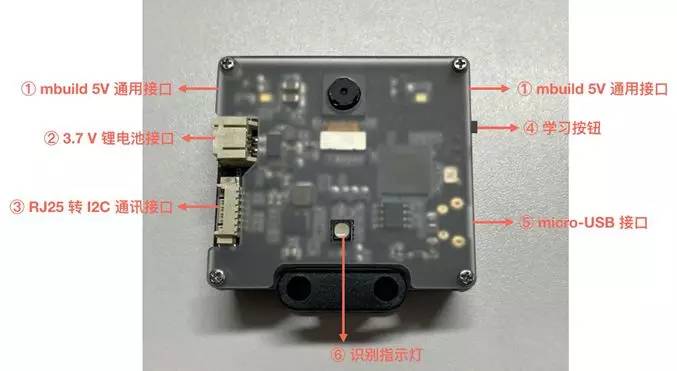
▲ 视觉模块 / USB摄像头

树莓派视觉方案:
▲ 硬件连接示意图
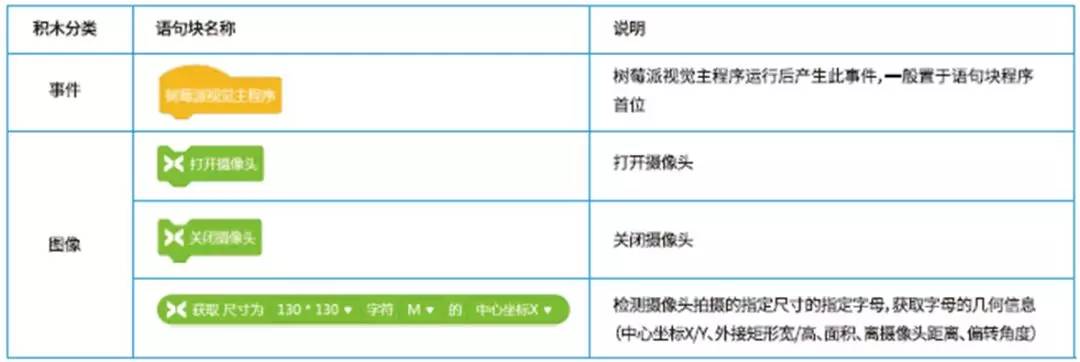
▲ 慧编程语句块说明
▲ 在慧编程上调试设备

▲ 慧编程舞台上出现实时视频预览, 表示树莓派视觉已能正常使用。

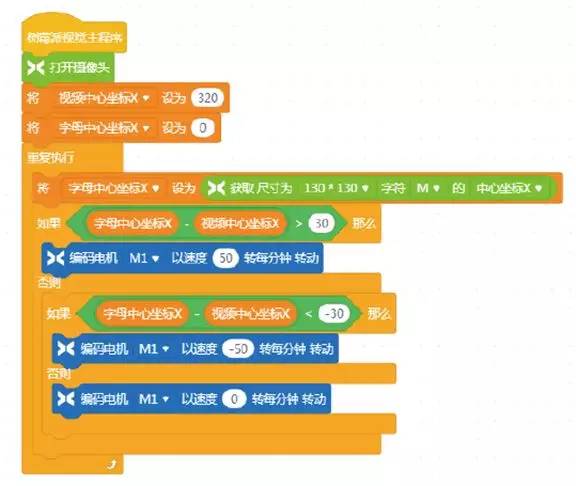
慧编程 程序示例:摄像头不断左右移动直至字母处于画面中心
程序说明:摄像头不断左右移动,直至“M”在视频画面中心的正负30像素范围内(注:视频画面分辨率为640*480)
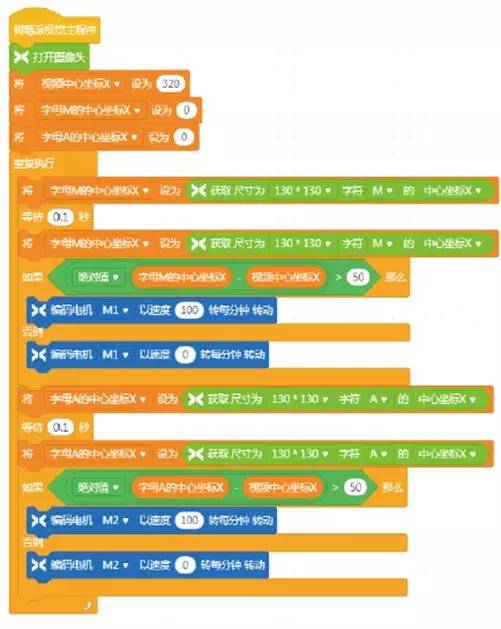
慧编程 程序示例:切换识别字母程序说明:先识别“M”的位置,再识别“A”的位置
注:切换字母时,可能无法立即识别到字母,因此需要连续2次获取字母坐标(间隔0.1秒),学会了视觉模块如何使用大家快动起来 让自己的机器人拥有一双明亮的“眼睛”吧。
发表评论